|
| Constructor |
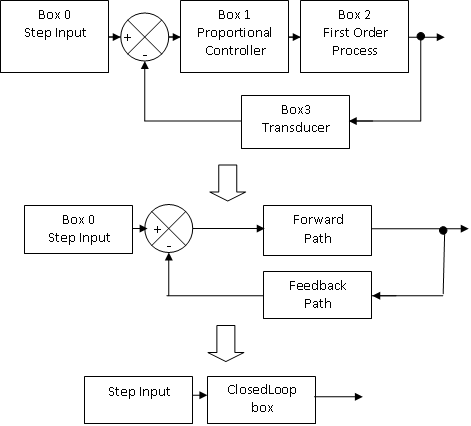
public ClosedLoop() | ||
|
Add boxes to the paths |
Forward path |
public void addBoxToForwardPath(BlackBox box) | |
| Feedback path |
public void addBoxToFeedbackPath(BlackBox box) | ||
|
Combine all added boxes into a single box |
public void consolidate() | ||
|
Remove all boxes from the path |
public void removeAllBoxes() | ||
|
Get the Vector of segments |
Closed loop path |
public Vector getClosedLoopSegmentsVector() | |
| Forward path |
public Vector getForwardPathSegmentsVector() | ||
|
Get the names of the boxes in the paths |
Closed loop path |
public String getNamesInClosedLoop() | |
| Forward path |
public String getNamesInForwardPath() | ||
|
Get the number of boxes in the paths |
Closed loop path |
public int getNumberOfBoxesInClosedLoop() | |
| Forward path |
public int getNumberOfBoxesInForwardPath() | ||
|
Get the number of segments in the paths |
Closed loop path |
public int getNumberOfSegmentsInClosedLoop() | |
| Forward path |
public int getNumberOfSegmentsInForwardPath() | ||
| Deep Copy |
public ClosedLoop copy() | ||
|
public Object clone() | |||
| See BlackBox for the inherited methods | |||